



OPLATÍ SA TEPLOVODIVÁ PASTA Z ALIEXPRESSU NA TEG?Porovnanie cenovo dostupných teplovodivých pást pre využitie na IoT pre termoelektrický generátor. Oplatí sa z Aliexpressu? |
|
|

GTA IV FIX SPUSTENIA NA WINDOWSE 10 NKrátky návod pre opravu chýb so spustením hry na Windowse 10 v edíciách N, ktoré nemajú Windows Media aplikácie. |
|
|
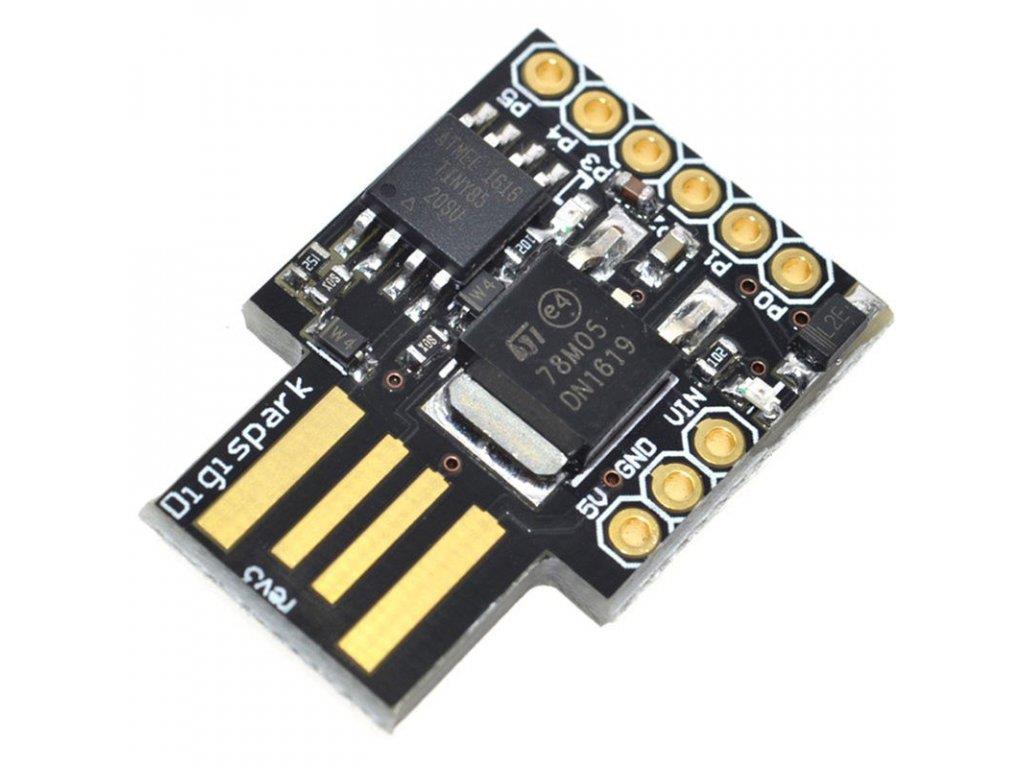
ATTINY85 DIGISPARK - PROGRAMOVANIE, POUŽITIEPohľad na mikrokontróler ATtiny85 použitý v doske Digispark. Obmedzenia, možnosti, programovanie... |

PREČO BY SOM SI UŽ NEKÚPIL ESPD-35 2.0 / 2.1 OD LASKAKITU?Popis z môjho pohľadu konštrukčného problému na ESPD doske od Laskakitu, ktorý obsahuje integrovaný TFT LCD displej 3,5" a ESP32-WROOM-32 modul. |
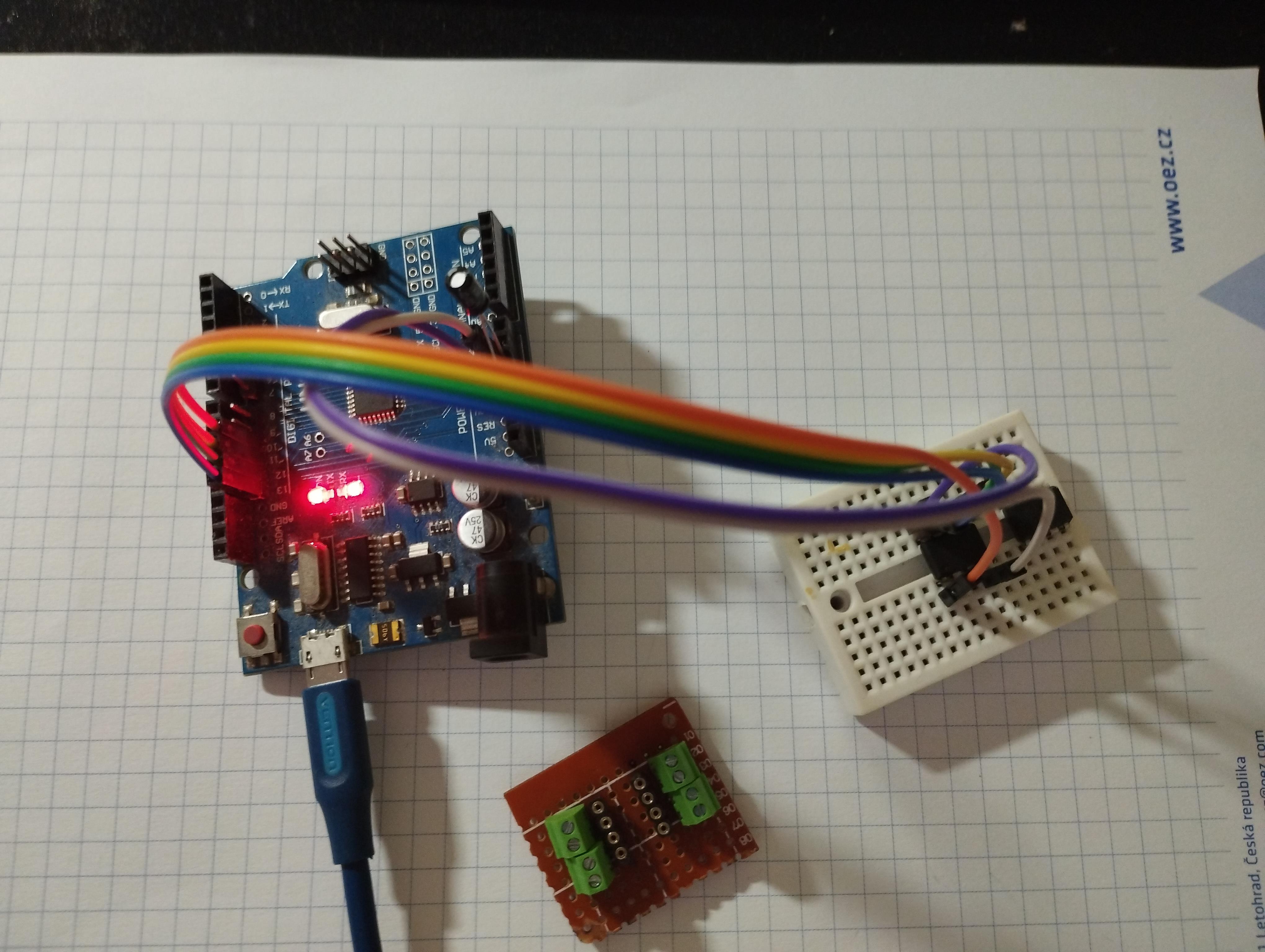
ATTINY85 - PROGRAMOVANIE ARDUINO AS ISPČlánok o malom švábe ATtiny85, jeho programovaní v prostredí Arduino IDE s využitím Arduina UNO ako programátora. |
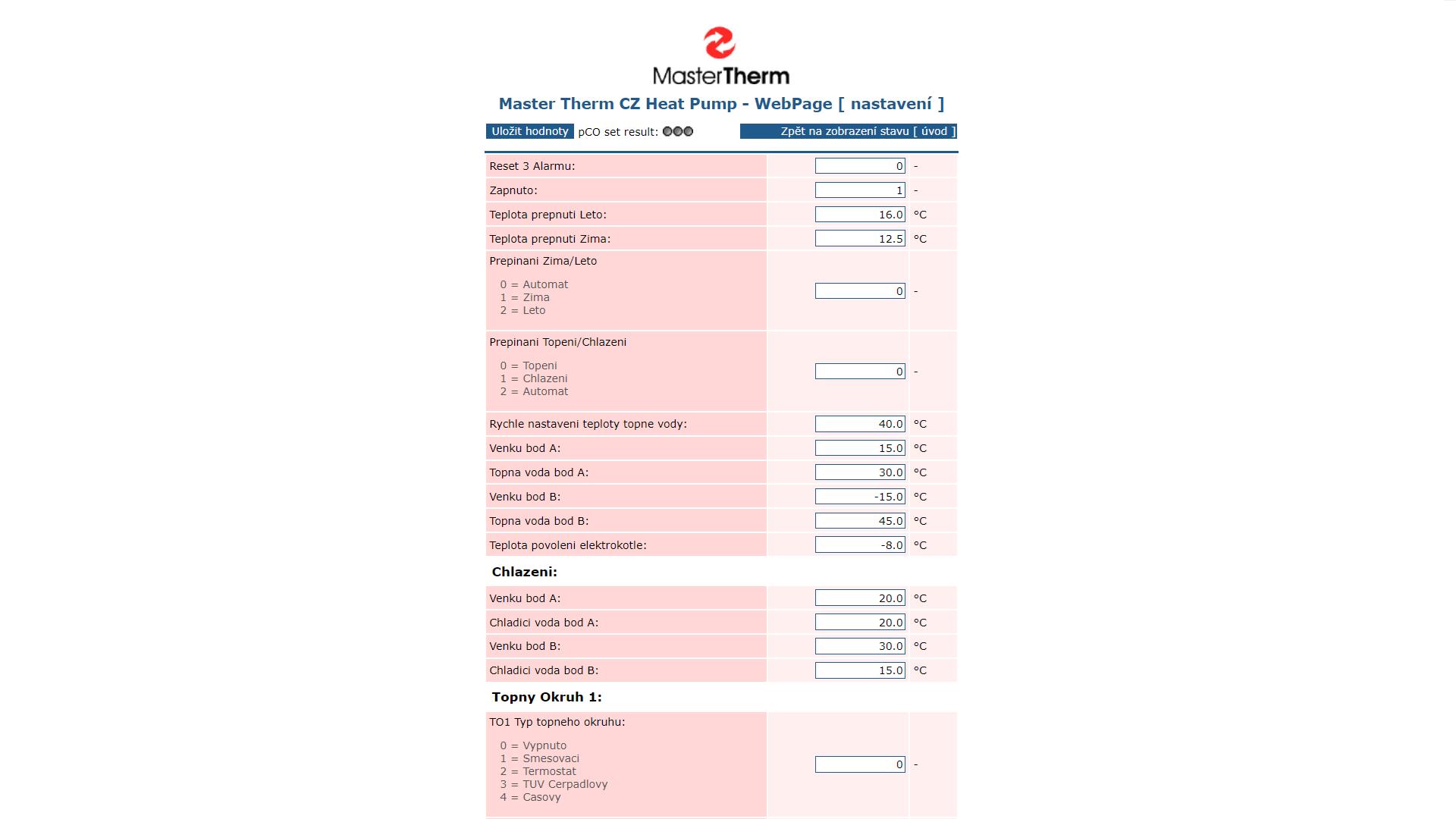
MASTERTHERM - WEBSCRAPER ESP32Získanie dát z webového rozhrania MasterThermu pre tepelné čerpadlo AirMaster. |

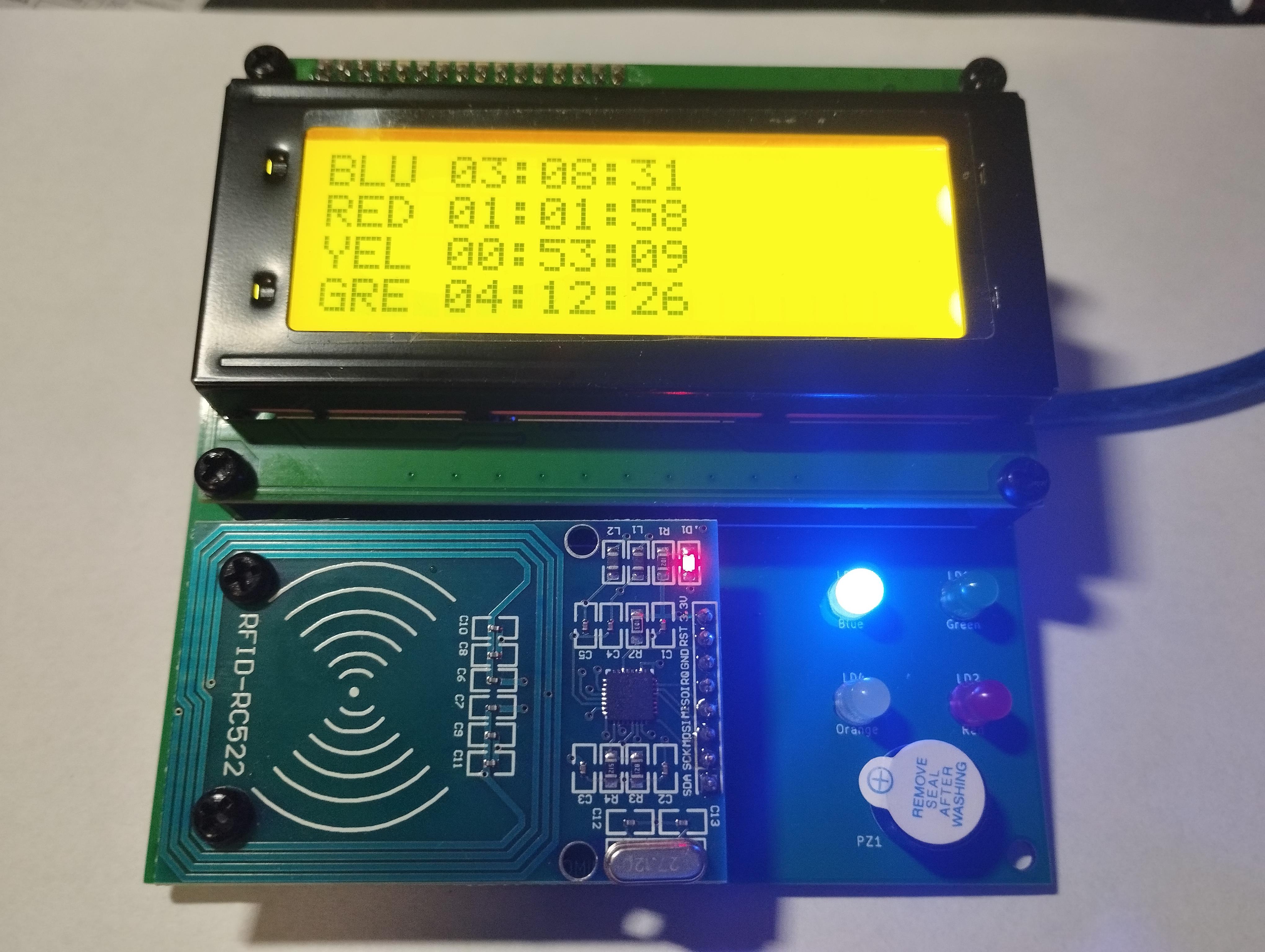
RFID DOMINATOR 2.0 - ROZDIELY S 1.0Nová DPS pre Airsoft/Paintball projekt RFID DOMINATOR 2.0. Porovnanie rozdielov voči predchádzajúcej verzii 1.0. |
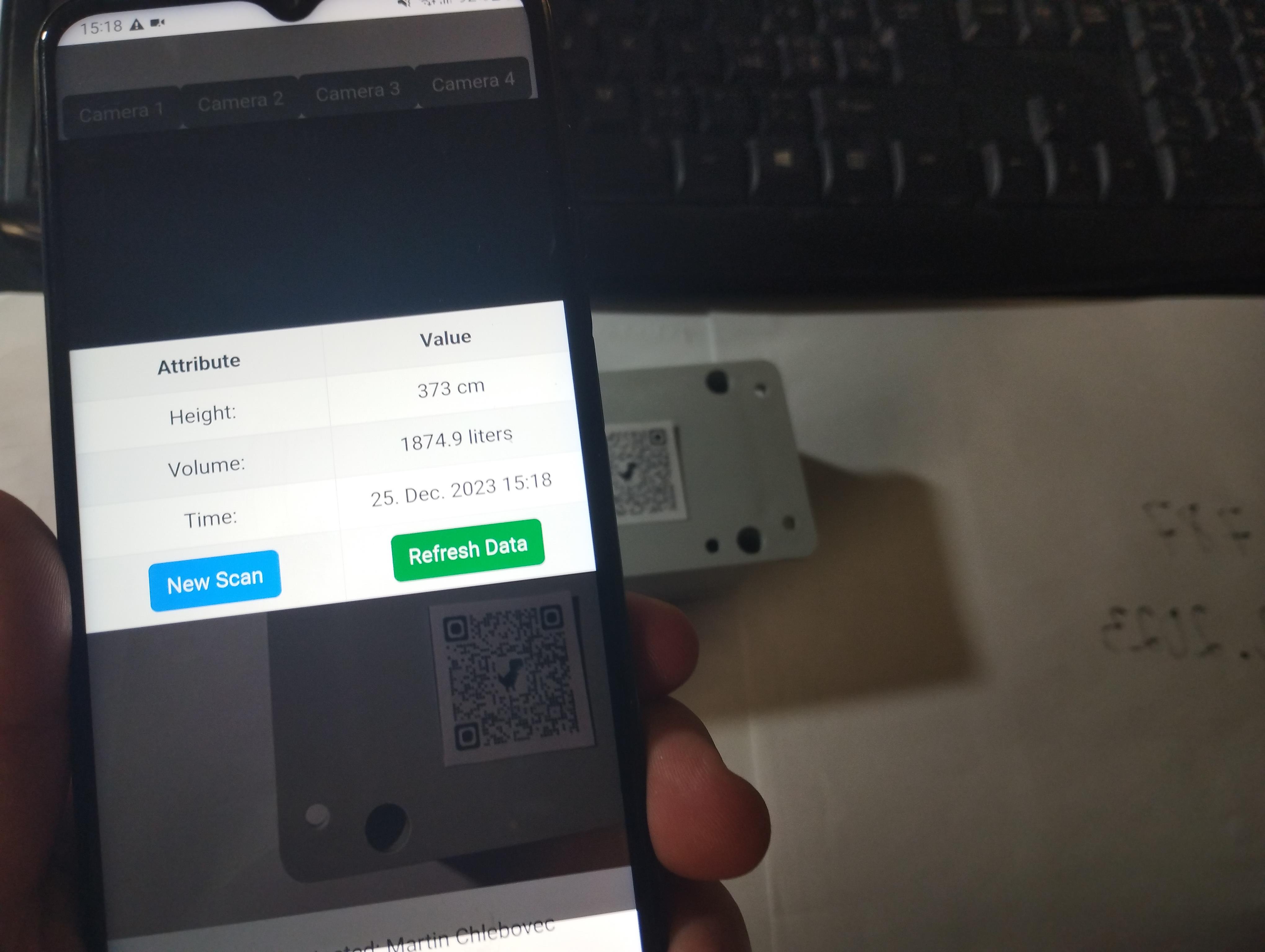
ROZŠÍRENÁ REALITA (AR) - IOT DASHBOARDAplikácia rozšírenej reality (Augmented reality) pre možnosť zobrazenia dát senzorového uzla (Arduino, ESP32) z IoT dashboardu po naskenovaní preddefinovaného QR kódu. |

SOLÁRNE NAPÁJANIE ESP32 - WIFI / LORAWANNapájanie ESP32 pre nekritické aplikácie počas dňa cez solárny panel bez nutnosti využitia batérie. Aplikácia vo WiFi a LoRaWAN aplikácii |
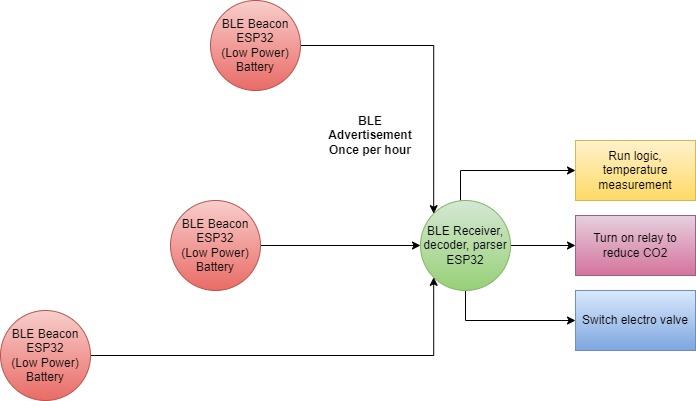
BLE BEACON NA ESP32 - VYSIELANIE VLASTNÝCH DÁTBluetooth Low Energy Beacon postavený na mikrokontroléri ESP32 |

NODE MOLD - DETEKTOR PLESNE OD ELOC8Popis IoT zariadenia Node Mold od firmy eLOC8 vyvíjaný na Slovensku pre účely detekcie plesne a merania dôležitých ukazovateľov kvality ovzdušia v interiéri. |
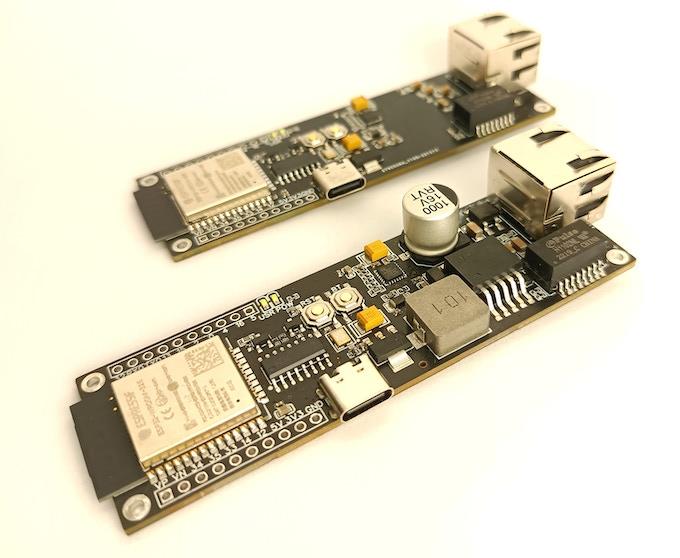
ČESKÝ KICKSTARTER ESP32 PROJEKT A ČO MA ODRADILO?Priblíženie kampane s mikrokontrolérom ESP32 na platforme Kickstarter pre crowdfunding. |

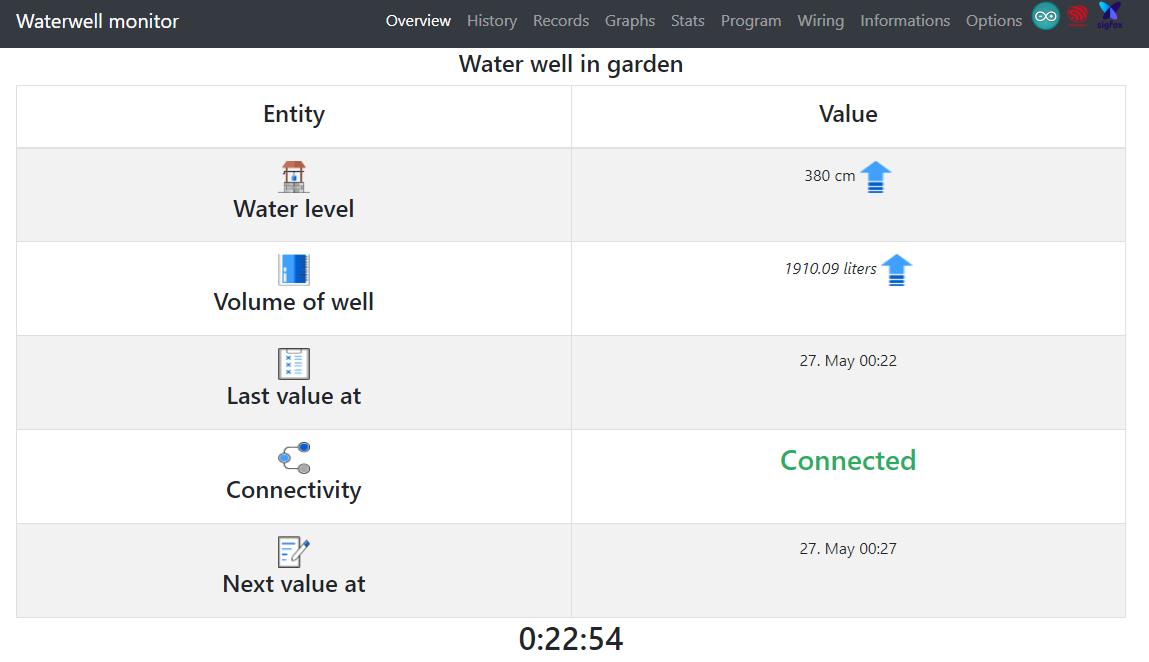
SENZOROVÝ UZOL PRE HLADINOMER - ESP32 S TFT DISPLEJOMUkážka mikrokontroléra ESP32 s TFT displejom ako senzorový uzol pre projekt hladinomer. |
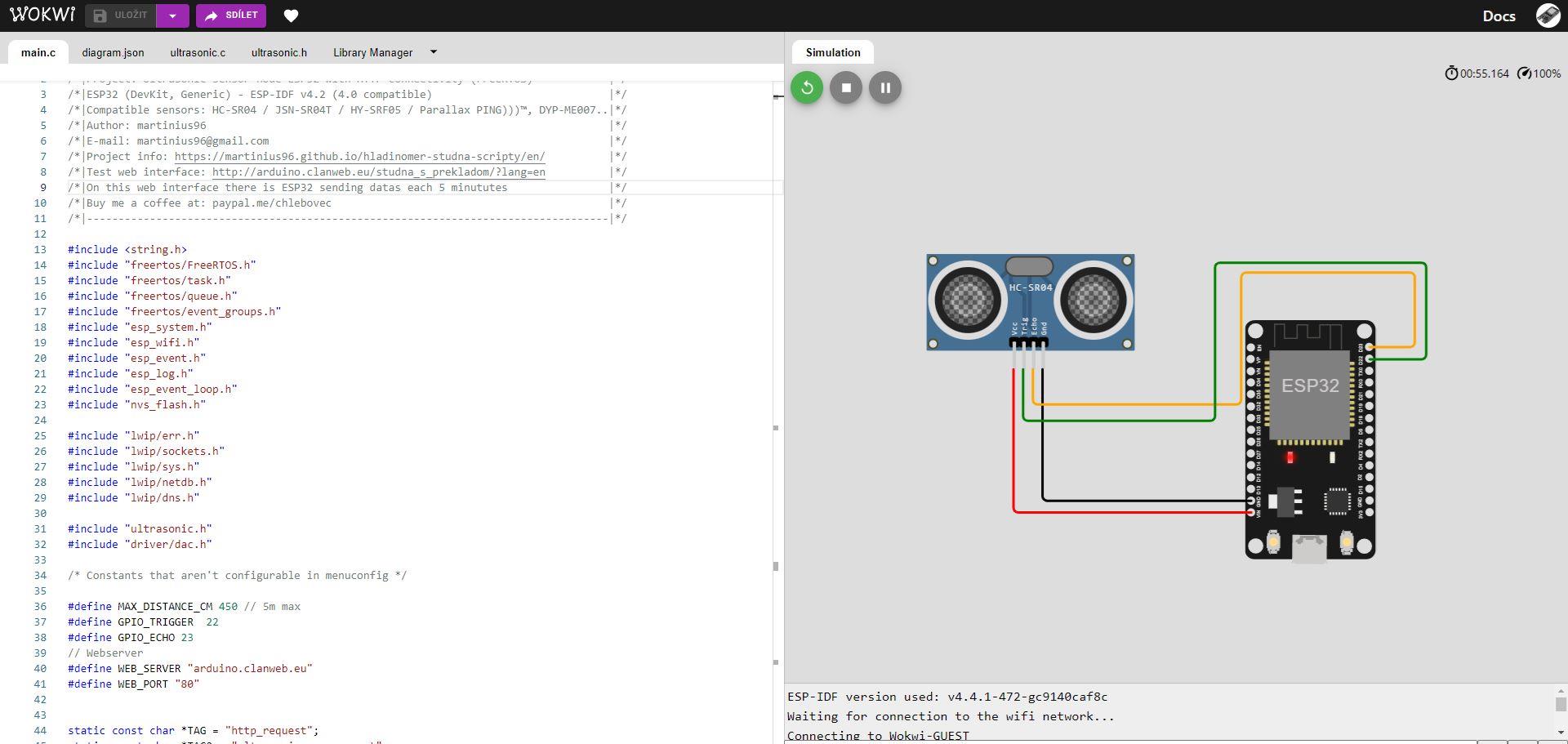
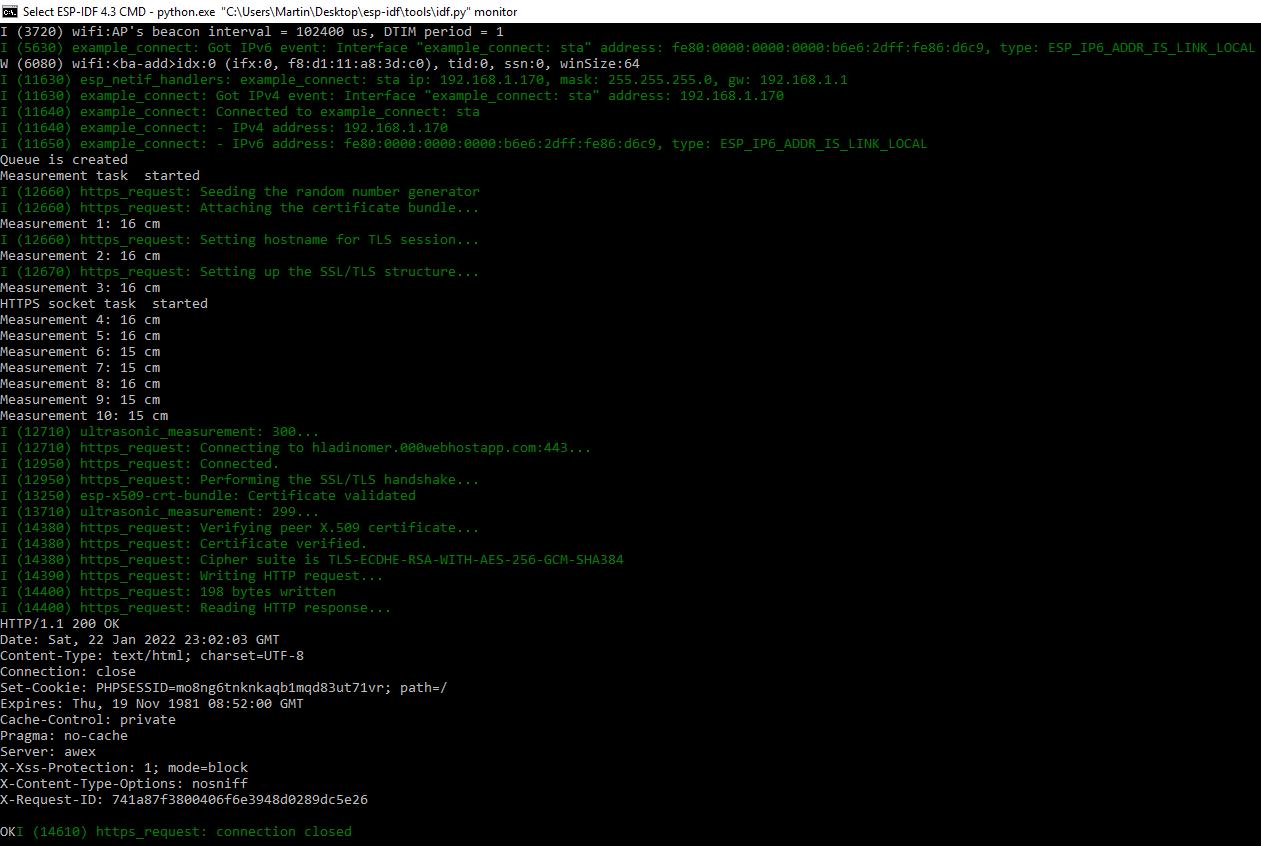
ESP-IDF V SIMULÁTORE WOKWI - ESP32Používanie low-level C/C++ funkcií frameworku ESP-IDF v online simulátore Wokwi pre mikrokontróler ESP32. |
SENZORY PRE ZÁZNAM VÝŠKY HLADINY VODYSúhrnný článok senzorov pre záznam výšky hladiny vody. Použitie s mikrokontrolérmi (Arduino, ESP8266, ESP32, STM32 a pod.). |
|
|

SIGFOX KONČÍ? VŠETKO TOMU NASVEDČUJEPohľad na pokrytie siete Sigfox na území Slovenska a Česka a ich zmenu s udalosťami uplynulého roka. |
AKO SPUSTIŤ NEEFEKTÍVNY PROGRAM EFEKTÍVNE? - FREERTOSMožnosti FreeRTOS pre efektívne spúšťanie taskov s blokovacími funkciami delay(). |
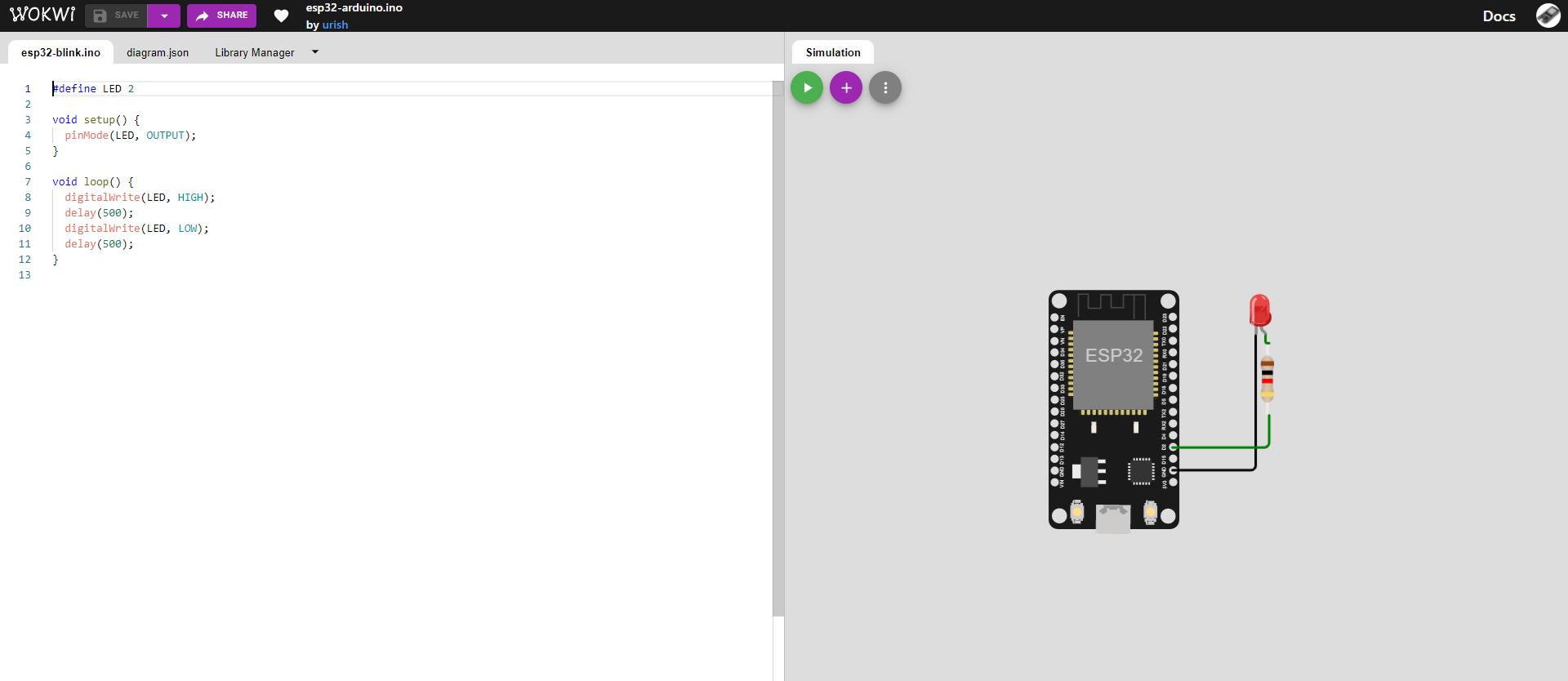
WOKWI - SIMULÁTOR PRE ARDUINO PROJEKTYPohľad na Wokwi simulátor pre Arduino projekty. Klady a zápory, na ktoré som narazil. |
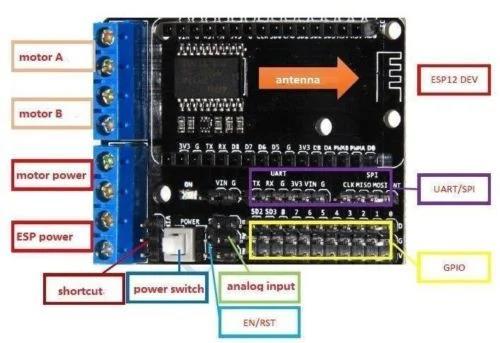
OVLÁDANIE DC MOTOROV - NODEMCU V2 + MOTOR SHIELD L293DPopis vývojového kitu NodeMCU v2 Amica s motor shieldom L293D, ovládanie DC motorov. |
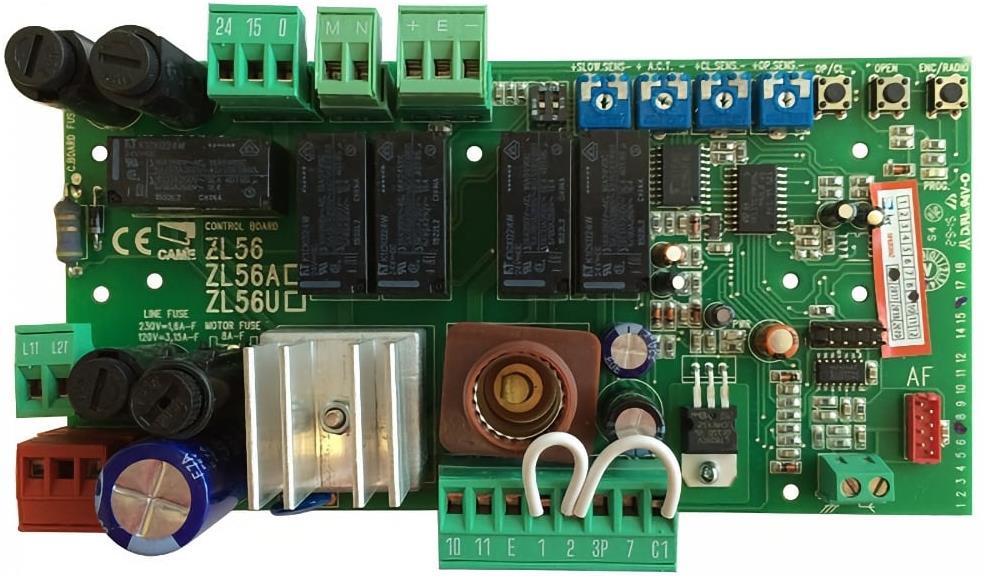
OTVÁRANIE GARÁŽOVEJ BRÁNY CAME CEZ SMARTFÓNPripojenie WiFi ovládača garážovej brány do existujúceho systému CAME so zachovaním pôvodného ovládania. |

KDE HĽADAŤ VIN - ZETOR UR1Návod, kde hľadať VIN číslo pre Zetory unifikovanej rady 1. Návod by mal byť teda pre Zetory 2011 až 6911. |
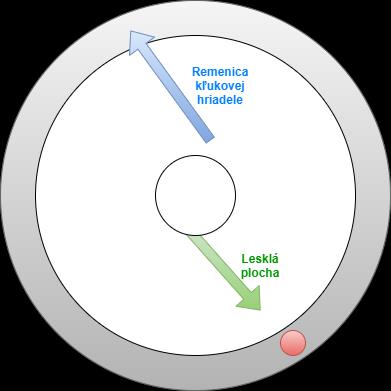
POČÍTADLO OTÁČOK SO ZASTAVENÍM MOTORAPočítadlo otáčok motora založené na IR senzore prekážok KY-032. Načítava pulzy v prerušení so SW debouncingom signálu. |
FREERTOS V ARDUINO IDE - ESP32Novoročný špeciál - krátky tutoriál pre mikrokontróler ESP32 a úprav programovej implementácie v prostredí Arduino IDE do špecifík FreeRTOS |
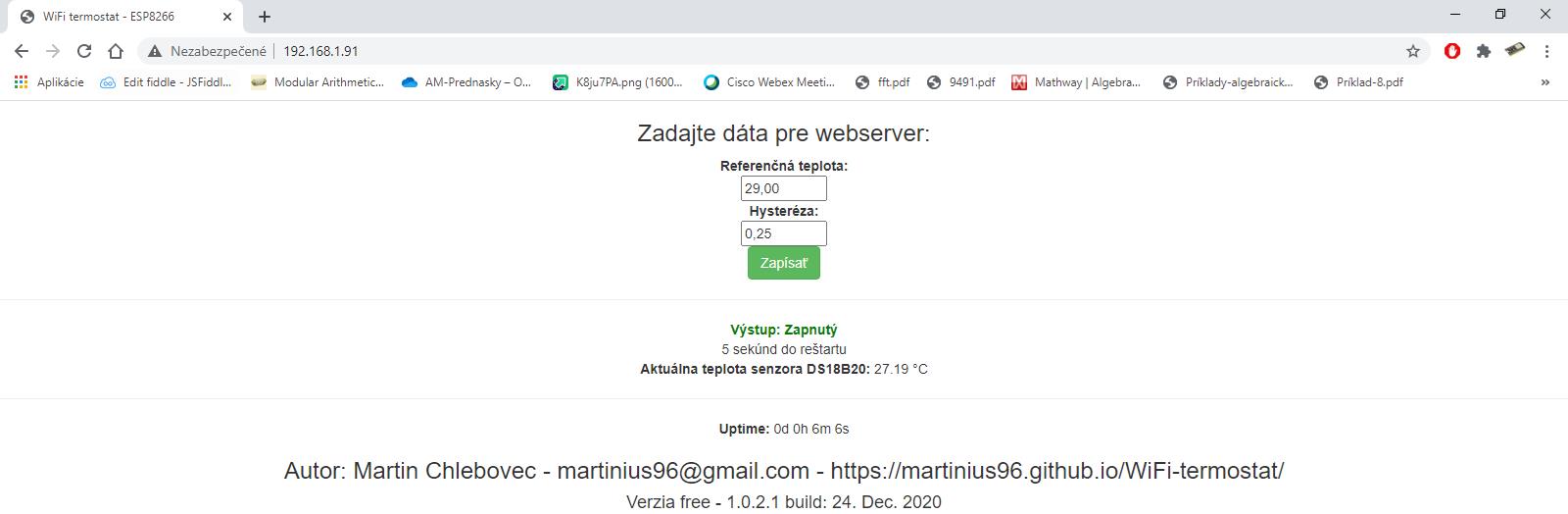
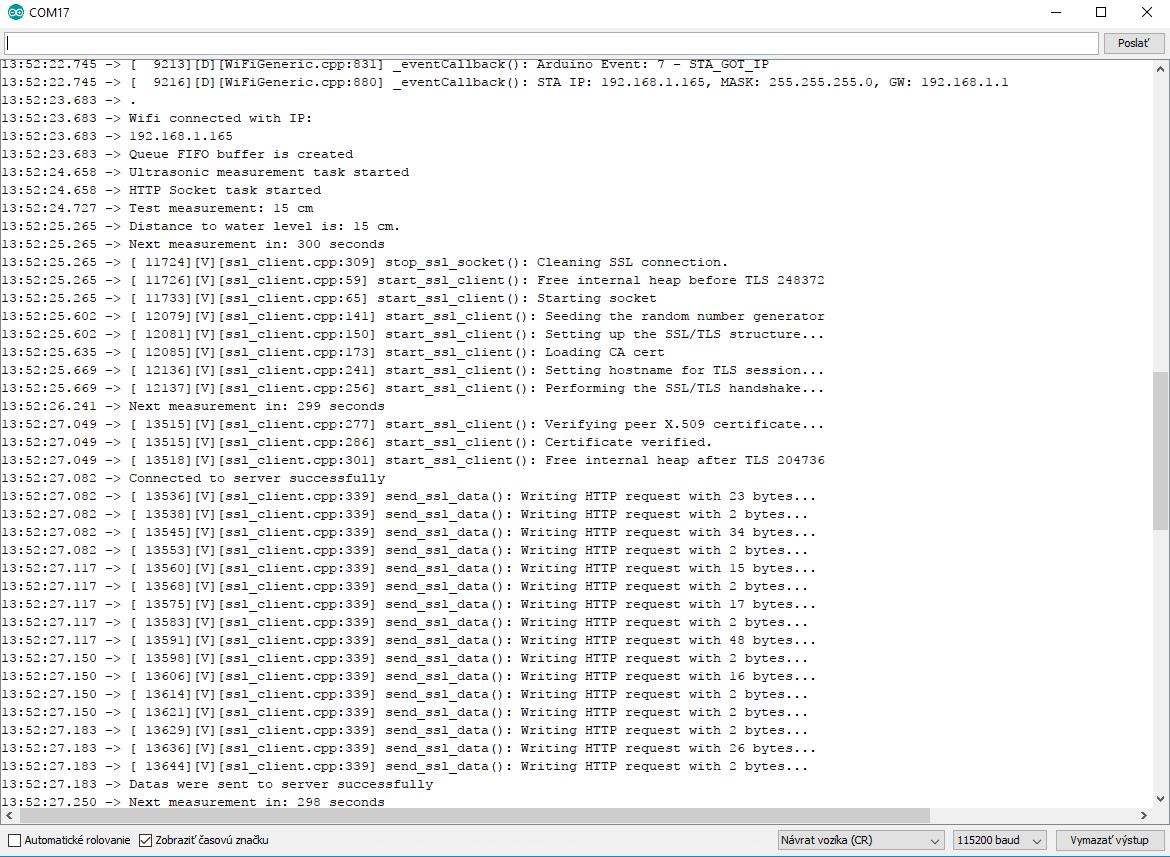
WIFI TERMOSTAT - ESPRESSIF SYSTEMS - ESP8266 / ESP32Súpisný článok projektu WiFi termostat (spojené čiastkové články, ktoré na Sector blogu vychádzali do celku s predstavením projektu.) |

ULP APLIKÁCIE - ESP8266 / ESP32ULP aplikácie realizované pod mikrokontrolérmi ESP8266 a ESP32. Možnosti prebudenia podporovanými zdrojmi. |

VEKTOROVÉ OBRÁZKY DO ZÁVEREČNÝCH PRÁC - WORDAko vložiť vektorový obrázok do Wordu? Exportovanie obrázkov blokových schém a vývojových diagramov do vektorového formátu .EMF, ktorý môže byť vložený do Microsoft Word. |

DETEKČNÁ CHARAKTERISTIKA - MATLABVizualizácia detekčnej charakteristiky ultrazvukových senzorov vzdialenosti v prostredí MATLAB pre projekt Hladinomer. |
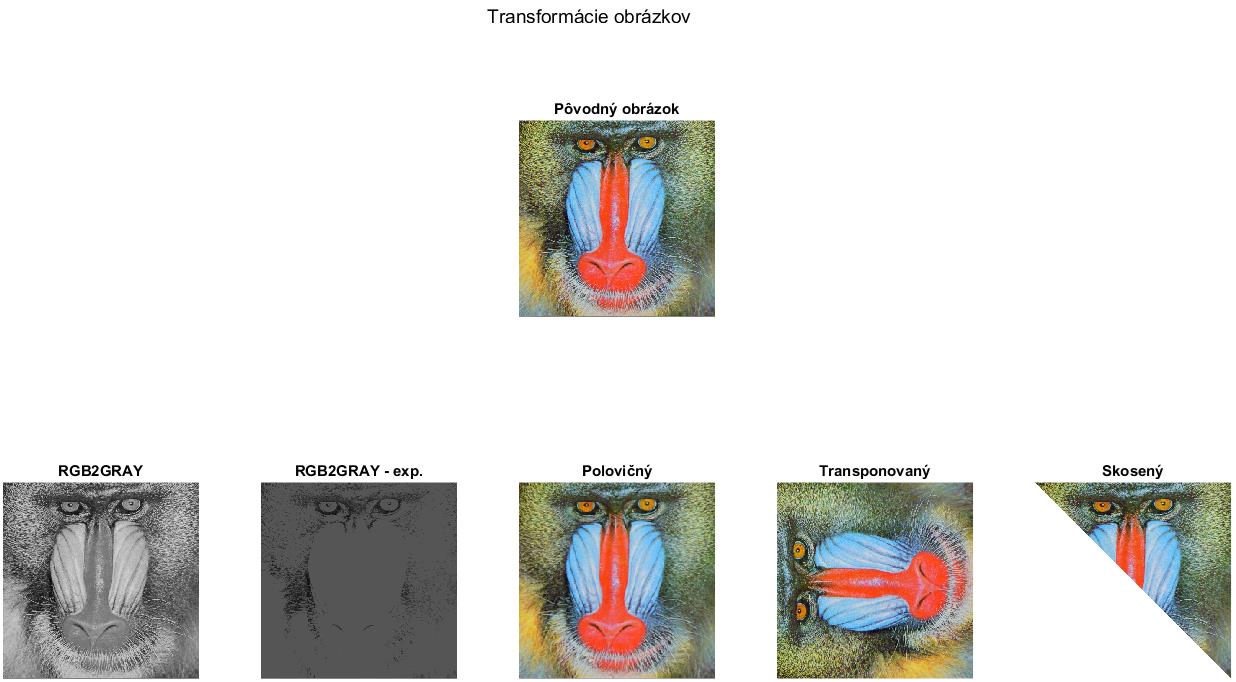
PRÁCA S OBRÁZKAMI - MATLABUkážka jednoduchých a základných operácii s obrázkami v prostredí MATLAB, ktoré môžu byť užitočné pre zadania, rýchle úpravy. |


 PRIHLÁS SA
PRIHLÁS SA





